


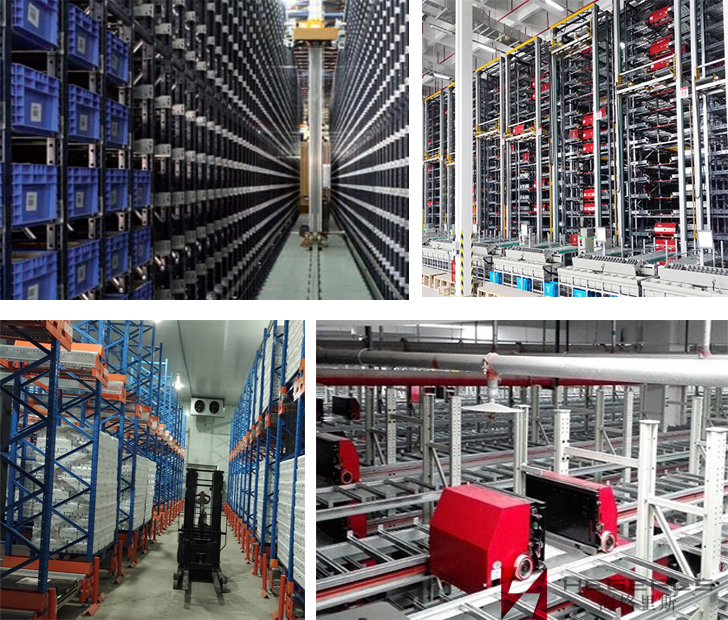
Nos últimos anos, com a popularidade contínua da Internet, o comércio eletrônico desenvolveu-se rapidamente. As mercadorias encomendadas pelos clientes apresentam características de muitas variedades, poucos lotes e curto prazo de entrega, o que faz com que a densidade de armazenamento das prateleiras do centro de distribuição logística do fornecedor melhore continuamente. A frequência de entrada e saída de materiais do armazém está aumentando. O número de coleta de peças pequenas está aumentando dia a dia. Cada vez mais centros de distribuição logística utilizam o sistema de coleta de mercadorias baseado em carros de transporte.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
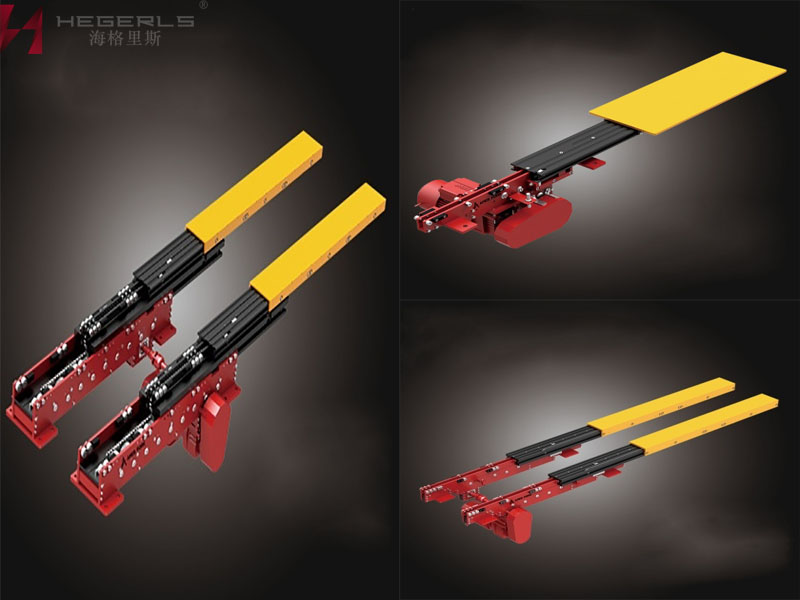
Os garfos telescópicos de fixação são amplamente utilizados em equipamentos de armazenamento automático, como carros de transporte multicamadas para armazéns estéreo, caixas tipo prateleira AGV, RGV e minicarga. O peso máximo da caixa de material mantida pela HEGERLS pode chegar a 50Kg. A largura de fixação do braço do garfo pode ser ajustada arbitrariamente na faixa de 200 ~ 600 mm. O curso máximo de coleta é de 840 mm. A velocidade máxima de operação do garfo telescópico é de 1,5m/s e a aceleração é de 1,2m/s²。 O ruído operacional é controlado dentro de 75dB, o que pode atender aos requisitos da maioria dos racks de extensão simples e dupla. A HEGERLS também pode personalizar o armazém estereoscópico do carro de transporte multicamadas da caixa do garfo telescópico de acordo com os requisitos específicos dos clientes, como largura de aderência, curso de coleta e outros parâmetros.
As peças no Hiygris HEGERLS agarraram a caixa de garfo telescópico armazém estéreo de carro de transporte multicamadas O garfo telescópico é um mecanismo telescópico usado no armazém estéreo e no sistema de armazenamento automático de logística para armazenamento ou transferência de material. Possui função de expansão automática bidirecional flexível e função de limite preciso! Pode ser montado diretamente no empilhador, ou montado em um mecanismo de elevação fixo, ou montado em uma plataforma de elevação móvel. O empilhador percorre a estrada entre as prateleiras para acessar ou transferir itens automaticamente! Ele pode ser conectado ao sistema de linha de produção e ao sistema de gerenciamento empresarial. Ele usa tecnologia de computador e código de barras (codificador) para realizar gerenciamento e operação inteligentes de informações!

Sobre o garfo telescópico de fixação HEGERLS
O garfo telescópico HEGERLS é um tipo único de garfo na série de garfos telescópicos de empilhadores, ou seja, um garfo telescópico automático bidirecional, também conhecido como garfo de retenção ou garfo de retenção, garfo ou garfo . É um garfo especialmente utilizado para a transferência de pequenos recipientes. Pode ser montado diretamente em AGV de picking de vários andares ou outras plataformas de trabalho, com a expansão do braço do garfo e a embreagem da alavanca (gancho), completando a ação de acesso ou transferência!
O garfo da pinça HEGERLS é feito principalmente de liga de alumínio, apresentando tamanho pequeno, peso leve, velocidade de operação rápida e expansão suave. Ao mesmo tempo, também adota o princípio da sincronização multimotor, percebendo que o mesmo mecanismo de garfo telescópico pode ser utilizado para transferir ou acessar caixas de diferentes especificações. Ele não apenas melhora efetivamente a eficiência do armazenamento, mas também melhora muito a taxa de utilização do espaço de armazenamento, especialmente para armazenamento inteligente intensivo em arranha-céus!
Clipe HEGERLS na estrutura do garfo telescópico
A estrutura do garfo de pinça HEGERLS pode ser dividida em local de armazenamento profundo e local de armazenamento raso. Um depósito profundo é um depósito com duas caixas de material, e um depósito raso é um depósito com uma caixa de material. Ou seja, um local de armazenamento profundo pode prender duas caixas de material por vez, enquanto um local de armazenamento raso só pode prender uma caixa de material por vez. A diferença entre o garfo de pinça HEGERLS e o garfo telescópico duplex comum é que o garfo de tração ainda é composto por três corpos de garfo, ou seja, o corpo do garfo interno, o corpo do garfo intermediário e o corpo do garfo externo, exceto que o corpo do garfo dianteiro tem mais uma haste de tração (gancho), que é combinada com o trilho guia (trilho deslizante), barra de rolo, roda síncrona, correia síncrona, barra fluente, haste de mudança (gancho), eixo de elevação, barra de roda, motor de acionamento (servo) , motor da haste de mudança O instrumento de detecção e outros componentes formam um mecanismo telescópico completo, que coopera com o braço do garfo telescópico e a embreagem da alavanca (gancho) para completar a ação de acesso ou transferência!
Princípio de funcionamento do clipe HEGERLS em garfo telescópico
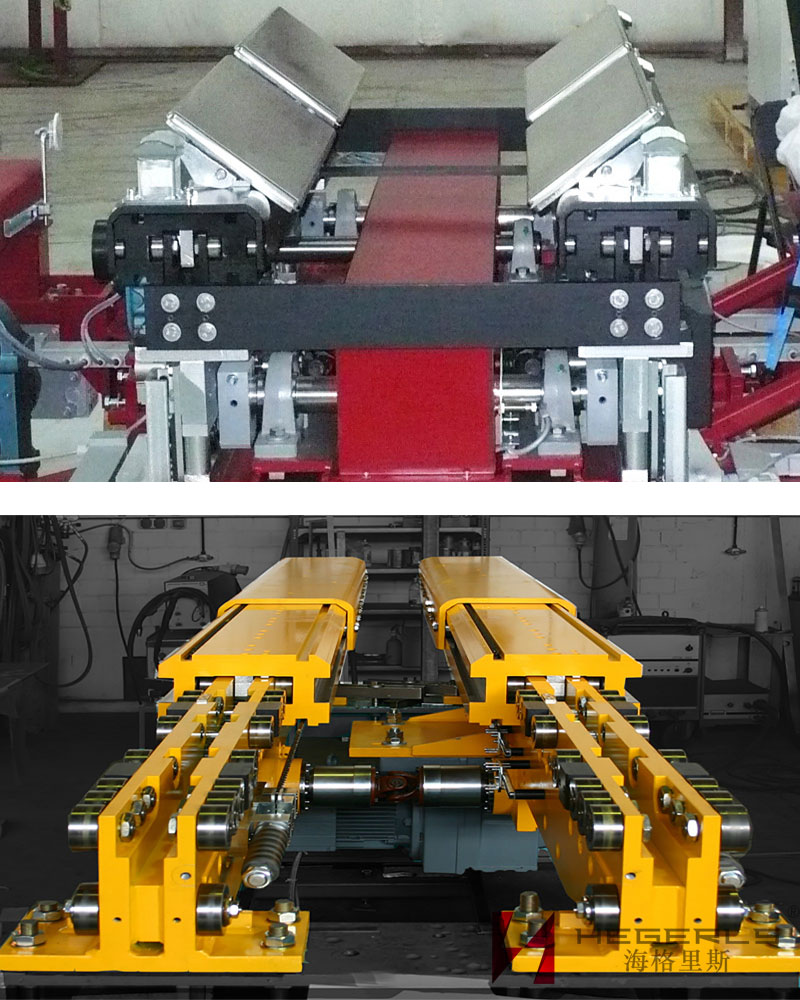
O braço do garfo HEGERLS é lateral e conectado lateralmente por um trilho-guia. Através do controle, o trilho-guia pode deslizar para frente e para trás para ajustar a distância entre os dois braços do garfo, de modo a alcançar o uso comum de um garfo para caixas de materiais com múltiplas especificações! Ao coletar materiais, o garfo se estende até a posição de armazenamento do material, o gancho de retenção (alavanca) abaixa automaticamente e bloqueia a face final da caixa de papelão ou plástico e, em seguida, o garfo se retrai, arrastando a caixa ou caixa de plástico para o meio de o garfo e, em seguida, move-se para trás de acordo com os requisitos de grau, o gancho (alavanca) é puxado para trás e o garfo retrai novamente para completar a tarefa de pegar ou transferir! Embora o princípio do garfo de pinça seja o mesmo do garfo telescópico comum, as peças de transmissão, bielas e outros componentes do garfo de dedo são muito diferentes. É usado para descrever que a roda dentada, a corrente, a engrenagem, a cremalheira, etc. são todas substituídas por rodas síncronas, correias síncronas, etc., enquanto o braço deslizante usa trilhos-guia e os materiais do corpo do garfo são todos substituídos por folhas de metal ou materiais de liga de alumínio, então o peso do garfo da pinça é de apenas cerca de 80kg.
Além disso, deve-se observar que durante o projeto do garfo telescópico tipo pinça, o tamanho das prateleiras de armazenamento densas, a posição vertical das prateleiras com caixas, o nível dos trilhos e o tamanho das caixas devem ser combinados para determinar o parâmetros gerais dos garfos de extensão (movimento dos garfos de extensão, espaçamento das caixas, largura dos garfos, largura interna dos garfos, altura dos garfos, etc.), de modo a atender às necessidades dos recipientes nas prateleiras. O garfo de fixação só pode transferir ou acessar os produtos embalados em caixas ou caixas plásticas de forma eficaz e não pode transferir materiais irregulares. Além disso, o volume e o peso da caixa de material transferida não devem ser muito grandes e o peso da carga não deve exceder 100KG! A altura do garfo de fixação é geralmente calculada de acordo com a altura do silo!
Sobre HEGERLS Clip on Shuttle
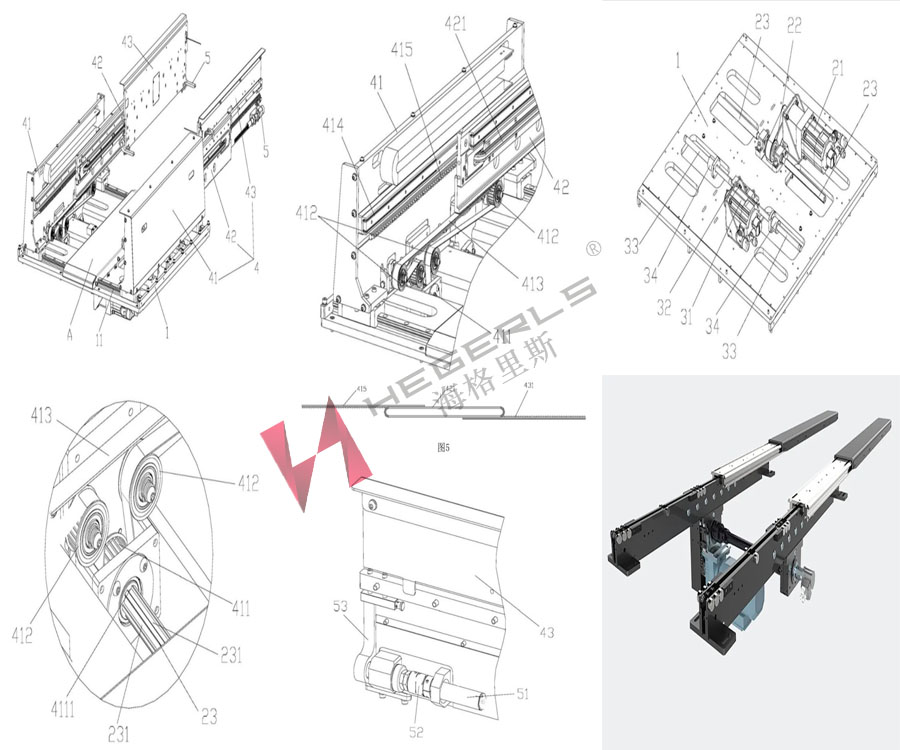
A estrutura do clipe HEGERLS na lançadeira consiste em estrutura da lançadeira, chassi da lançadeira, mecanismo de deslocamento, mecanismo secundário de extensão do garfo, coletor, placa de rolamento e plataforma de rolamento. A estrutura é a seguinte:
Qualquer estrutura da lançadeira é geralmente uma cavidade fechada composta pelos suportes do corpo principal em ambos os lados, a carcaça e o suporte do cubo interno, e é disposta respectivamente em ambas as extremidades do chassi da lançadeira; A carcaça é dotada de uma tampa superior que pode ser aberta e fechada através de uma dobradiça de porta giratória; Uma grade do painel está disposta acima do suporte do cubo; O mecanismo de deslocamento compreende uma roda motriz, uma roda passiva, um motor DC sem escova, um redutor e um eixo de conexão; Ambos os lados da estrutura da lançadeira em uma extremidade do chassi da lançadeira são fornecidos com rodas motrizes conectadas por eixos de conexão, e ambos os lados da estrutura da lançadeira na outra extremidade do chassi da lançadeira são fornecidos com rodas passivas conectadas por eixos de conexão; O motor DC sem escova coopera com o redutor para acionar a roda motriz e acionar a roda passiva; O eixo de conexão é dotado de um codificador magnético, através do qual são obtidas as posições de partida e parada da lançadeira na pista reta; Um mecanismo secundário de extensão do garfo está disposto simetricamente no lado interno da estrutura do carro de transporte; O chassi da lançadeira entre os mecanismos secundários de extensão dos garfos é dotado de plataforma de apoio para colocação do cesto de carga; A cavidade fechada da estrutura do carro vaivém é dotada, respectivamente, de uma placa de apoio, na qual uma placa de acionamento, uma placa de controle principal do mecanismo de deslocamento e uma placa de controle principal do mecanismo de extensão do garfo são dispostas sucessivamente; A placa de acionamento aciona o mecanismo de deslocamento para fazer com que a lançadeira corra em linha reta. A placa de controle principal do mecanismo de deslocamento controla os parâmetros de funcionamento e as posições de parada inicial da lançadeira, e a placa de controle principal do mecanismo de extensão do garfo controla o mecanismo secundário de extensão do garfo para agarrar e colocar a cesta na prateleira; Um dispositivo coletor é colocado entre o carro de transporte e a pista reta, que é conectado ao fio eletrificado disposto dentro da pista reta e usado para fornecer energia ao carro de transporte. A característica estrutural do clipe no carro de transporte inteligente para armazenamento também reside no fato de que as ranhuras são colocadas nas posições onde a roda motriz e a roda passiva, respectivamente, entram em contato com o eixo de conexão, e um anel retentor elástico é colocado na ranhura para formar o eixo axial. posicionamento da roda motriz e da roda passiva. As rodas guia duplas são colocadas respectivamente na lateral do chassi do ônibus, sob a roda motriz e a roda passiva, e entre a pista reta e o chassi do ônibus. As rodas guia duplas formam os limites esquerdo e direito quando a roda motriz e a roda passiva estão rodando em linha reta. O mecanismo de extensão do garfo secundário inclui: a placa de extensão do garfo de primeiro nível, a placa de extensão do garfo de segundo nível, o mecanismo de polia síncrona de segundo nível, o mecanismo de acionamento de extensão do garfo de segundo nível, o motor de acionamento de extensão do garfo, outro redutor e o eixo de acionamento ; O lado externo do suporte do cubo da estrutura do carro de transporte é fornecido com uma placa de pressão de extensão do garfo de primeiro estágio; Uma rampa em forma de U está disposta no meio da placa de empurrar o garfo do primeiro estágio, e várias polias da rampa em forma de U estão dispostas em intervalos iguais na rampa em forma de U; Uma placa de garfo secundária está disposta fora da calha em forma de U; A placa do garfo secundário é conectada a várias polias ranhuradas em forma de U por meio de parafusos e porcas; As extremidades superiores da placa de extensão do garfo do segundo estágio são fornecidas respectivamente com um garfo de mudança, um motor redutor planetário DC e um sensor fotoelétrico de fora para dentro; O sensor fotoelétrico é utilizado para obter o sinal de posição do garfo e enviá-lo para a placa de controle principal do mecanismo de extensão do garfo, que controla o motor redutor planetário DC para acionar o movimento horizontal ou vertical do garfo; Um mecanismo de polia síncrona secundária está disposto respectivamente na placa de impulso do garfo primário e diretamente abaixo e acima da rampa em forma de U; O mecanismo de polia síncrona secundária é conectado à placa de pressão da correia síncrona na placa de extensão do garfo secundário; O motor de acionamento de extensão do garfo e outro redutor acionam o mecanismo de acionamento de extensão do garfo secundário para se mover e acionam o mecanismo de acionamento de extensão do garfo secundário no outro lado para se mover através do eixo de acionamento, de modo que a placa de pressão de extensão do garfo primário se mova e acione o secundário mecanismo de polia síncrona se mova, fazendo com que a placa de extensão do garfo secundário se mova. O mecanismo de transmissão de extensão do garfo de dois estágios compreende um codificador magnético, uma polia de correia síncrona I, uma correia síncrona I, um dispositivo de roda tensora e uma cremalheira; Uma polia de correia dentada 1 e uma correia dentada 1 estão dispostas abaixo da placa de impulso do garfo do primeiro estágio; Um lado da polia da correia síncrona I está conectado ao eixo de transmissão e o outro lado está conectado ao eixo de saída do outro redutor através do rasgo de chaveta. Dispositivos de roda tensora são colocados respectivamente em ambos os lados do outro redutor para fixação auxiliar da polia da correia síncrona I e da correia síncrona I; Uma cremalheira é disposta entre a placa empurradora do garfo do primeiro estágio e a correia síncrona; O motor de acionamento da extensão do garfo e outro redutor acionam a polia da correia síncrona I e a correia síncrona I para girar e acionam a polia da correia síncrona II e a correia síncrona II do outro lado para girar através do eixo de transmissão. Ao mesmo tempo, os racks em ambos os lados acionam a placa de pressão de extensão do garfo primário correspondente para obter a extensão do garfo primário. Quando o mecanismo da polia da correia síncrona secundária se move de forma síncrona e aciona a placa de extensão do garfo secundário, a polia em forma de U rola na rampa em forma de U. Faça com que a placa de extensão do garfo secundário realize a extensão do garfo secundário. O dispositivo da roda tensora inclui: parafuso, suporte de ajuste, porca dupla e roda tensora; Uma roda tensora está disposta abaixo da correia síncrona I e em ambos os lados do outro redutor, e é fixada no suporte do corpo principal através de uma porca dupla; Um suporte de ajuste é disposto sob a porca dupla através do parafuso, e a posição do suporte de ajuste é ajustada pelo parafuso, de modo que o suporte de ajuste acione a porca dupla para se mover para cima e para baixo, para que a correia síncrona possa manter o estado de tensão sob a ação da roda tensora.
Como o ônibus HEGERLS gerará benefícios empresariais?
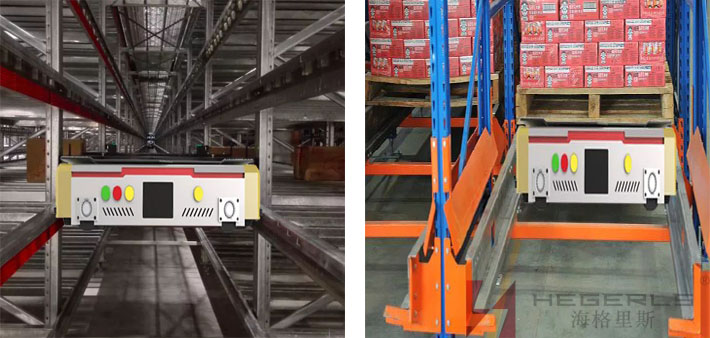
Primeiro, o mecanismo de deslocamento, o mecanismo de extensão do garfo e a estrutura, a linha de contato deslizante e o dispositivo de coleta de energia do carro de transporte inteligente HEGERLS com armazenamento por clipe estão razoavelmente organizados, o que aproveita ao máximo o espaço do carro de transporte e pode se adaptar ao armazenamento e recuperação automática de mercadorias de diferentes especificações e localizações no armazém tridimensional, ampliando a cobertura de aplicação do carro de transporte e completando de forma rápida e eficaz uma série de ações contínuas do carro de transporte, como caminhar, estender o garfo, escolher levantar e colocar mercadorias, realiza o armazenamento rápido e preciso de mercadorias, melhorando muito a eficiência da operação e o nível de tecnologia de automação do armazém automatizado e reduzindo os custos de investimento das empresas. Ao mesmo tempo, tem uma estrutura simples e leve, alta confiabilidade e fácil manutenção. Ele pode substituir o empilhador rodoviário tradicional, percebendo a flexibilidade do sistema e está em conformidade com a tendência de desenvolvimento da logística de comércio eletrônico e automação de armazenamento.
Em segundo lugar, no mecanismo de deslocamento do carro de transporte inteligente HEGERLS, os eixos de conexão das rodas motrizes e das rodas passivas são fornecidos com ranhuras, e as peças de conexão dos rolamentos são conectadas por um novo tipo de anel retentor elástico, realizando o efeito de posicionamento axial da conexão eixos; Ao usar o anel retentor elástico para obter o efeito de posicionamento axial, a eficiência da produção pode ser aumentada e o custo pode ser economizado.
Terceiro: O carro de transporte inteligente Higelis HEGERLS para armazenamento percebe que a roda motriz e a roda passiva sempre se movem na pista reta sem se desviar da pista através da estrutura da roda guia dupla. Esta estrutura de posicionamento é mais estável e confiável.
Quarto, a estrutura secundária de extensão do garfo adotada pelo carro de transporte inteligente HEGERLS pode aumentar a distância de extensão do garfo e obter mais cestos em diferentes posições; Ao mesmo tempo, o princípio do mecanismo secundário de extensão do garfo é simples e o custo de projeto e fabricação é baixo; A parte de transmissão adota o modo de motor único + redutor + eixo de transmissão para fazer com que o mecanismo de extensão do garfo secundário atinja o objetivo de expansão e contração síncronas, o que economiza mais custos, reduz efetivamente o espaço de layout necessário e reduz o peso do carro de transporte .
Em quinto lugar, o carro de transporte inteligente Higelis HEGERLS adota um novo tipo de dispositivo de roda tensora, que pode manter rapidamente a correia síncrona tensionada e realizar o trabalho normal do carro de transporte. Além disso, este dispositivo de roda tensora é simples de fazer, fácil de instalar e pode ser ajustado rapidamente, o que economiza custos, espaço e melhora a eficiência do trabalho.
Horário da postagem: 19 de dezembro de 2022